
 首页 > 新闻资讯 > 小九体育直播在线观看
首页 > 新闻资讯 > 小九体育直播在线观看
发布日期:2023-09-27 作者: 小九体育直播在线观看
图像阈值化分割是一种传统的最常用的图像分割方法,因其实现简单、计算量小、性能较稳定而成为图像分割中最基本和应用最广泛的分割技术。它非常适合于目标和背景占据不同灰度级范围的图像。它不但可以极大的压缩数据量,而且也大大简化了分析和处理步骤,因此在很多情况下,是进行图像分析、特征提取与模式识别之前的必要的图像预处理过程。
阈值处理是指剔除图像内像素值高于阈值或者低于阈值得像素点。例如,设定阈值为127,将图像内所有像素值大于127的像素点的值设为255;将图像内所有像素值小于127的像素点的值设为0。
图像阈值化的目的是要按照灰度级,对像素集合进行一个划分,得到的每个子集形成一个与现实景物相对应的区域,各个区域内部具有一致的属性,而相邻区域不具有这种一致属性。这样的划分可以通过从灰度级出发选取一个或多个阈值来实现。
maxval — 当type为THRESH_BINARY或者THRESH_BINARY_INV时,设定的最大值
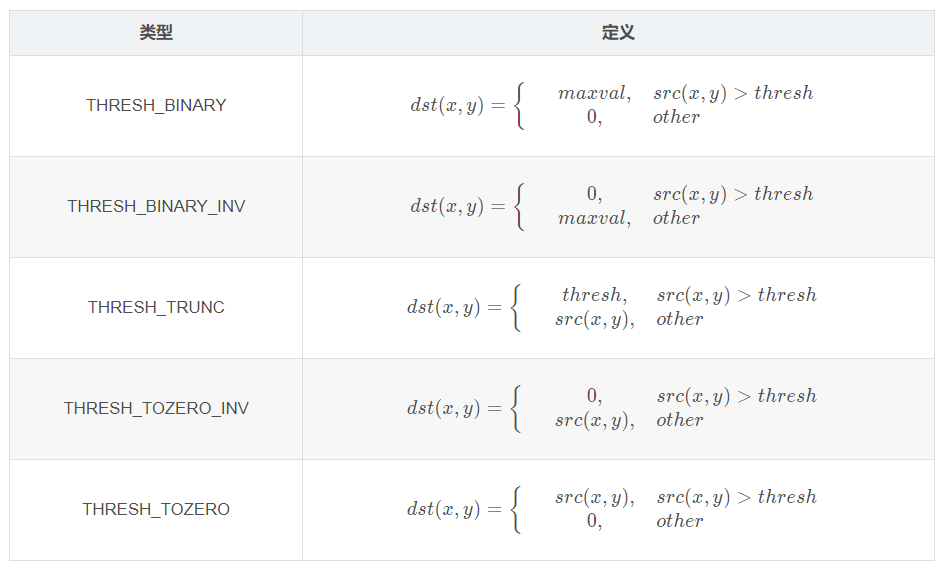
THRESH_BINARY;二值化阈值处理:灰度值大于阈值的点,将其灰度值设定为最大值,灰度值小于或等于阈值的点,将其灰度值设定为0
THRESH_BINARY_INV;反二值化阈值处理:灰度值大于阈值的点,将其灰度值设定为0,灰度值小于或等于阈值的点,将其灰度值设定为最大值
THRESH_TRUNC;截断阈值化处理:灰度值大于阈值的点,将其灰度值设定为阈值,灰度值小于或等于阈值的点,其灰度值保持不变
THRESH_TOZERO;低阈值零处理:灰度值大于阈值的点,其灰度值保持不变,灰度值小于或等于阈值的点,将其灰度值设定为0
THRESH_TOZERO_INV;高阈值零处理:灰度值大于阈值的点,将其灰度值设定为0,灰度值小于或等于阈值的点,其灰度值保持不变
THRESH_BINARY;二值化阈值处理:灰度值大于阈值的点,将其灰度值设定为最大值,灰度值小于或等于阈值的点,将其灰度值设定为0
THRESH_BINARY_INV;反二值化阈值处理:灰度值大于阈值的点,将其灰度值设定为0,灰度值小于或等于阈值的点,将其灰度值设定为最大值
THRESH_TRUNC;截断阈值化处理:灰度值大于阈值的点,将其灰度值设定为阈值,灰度值小于或等于阈值的点,其灰度值保持不变
THRESH_TOZERO;低阈值零处理:灰度值大于阈值的点,其灰度值保持不变,灰度值小于或等于阈值的点,将其灰度值设定为0
THRESH_TOZERO_INV;高阈值零处理:灰度值大于阈值的点,将其灰度值设定为0,灰度值小于或等于阈值的点,其灰度值保持不变
使用threshold进行阈值处理时,需要自定义一个阈值,并以此阈值作为图像阈值处理的依据 。通常情况下对于色彩均衡的图像,直接将阈值设为127即可,但有时图像灰度级的分布是不均衡的,如果此时还将阈值设为127,那么阈值处理的结果就是失败的。所以要找出图像的最佳的分割阈值。OTSU就是获得最佳阈值的方法。
OTSU(大津法)是一种确定图像二值化分割阈值的算法,由日本学者大津于1979年提出。从大津法的原理上来讲,该方法又称作最大类间方差法,因为按照大津法求得的阈值进行图像二值化分割后,前景与背景图像的类间方差最大。
它被认为是图像分割中阈值选取的最佳算法,计算简单,不受图像亮度和对比度的影响,因此在数字图像处理上得到了广泛的应用。它是按图像的灰度特性,将图像分成背景和前景两部分。因方差是灰度分布均匀性的一种度量,背景和前景之间的类间方差越大,说明构成图像的两部分的差别越大,当部分前景错分为背景或部分背景错分为前景都可能会导致两部分差别变小。因此,使类间方差最大的分割意味着错分概率最小。
OTSU 是求图像全局阈值的最佳方法,适用于大部分需要求图像全局阈值的场合。
缺点:对图像噪声敏感;只能针对单一目标分割;当图像中的目标与背景的面积相差很大时,表现为直方图没有明显的双峰,或者两个峰的大小相差很大,分割效果不佳,或者目标与背景的灰度有较大的重叠时也不能准确的将目标与背景分开。导致此现状出现的原因是该方法忽略了图像的空间信息,同时该方法将图像的灰度分布作为分割图像的依据,因而对噪声也相当敏感。所以,在实际应用中,总是将其与其他方法结合起来使用。
假设图像的像素个数为M×N。假设存在阈值T将图像所有像素分为两类C1(像素值小于T)和C2(像素值大于T)。假设图片背景较暗,则C1类为背景,C2类为前景。像素被分为C1和C2类的概率分别为p1、p2。图像中属于C1类的像素个数记作N1,其平均灰度;属于C2类的的像素个数记作N2,其平均灰度为。图像的总平均灰度记为,类间方差记为。
求得使最大的灰度级K,就是OTSU的阈值。OTSU方法会遍历所有灰度级,找到最佳阈值。
前面介绍了OTSU算法,但这算法还属于全局阈值法,即整张图片只有一个阈值。所以对某些光照不均的图像,这种方法没办法得到清晰有效的阈值分割结果图像,如下图:

显然,这样的阈值处理结果不是我们想要的,所以要使用变化的阈值对图像进行分割,这种技术称为自适应阈值解决方法。它的思想不是计算全局图像的阈值,而是根据图像不一样的区域亮度分布,计算其局部阈值,所以对于图像不一样的区域,能够自适应计算不同的阈值,因此被称为自适应阈值法。
确定局部阈值的方法:计算每个像素点周围临近区域的加权平均值获得阈值,并使用该阈值对该像素点进行处理。
在OpenCV中,给参数type多传递一个参数“THRESH_OTSU”就可以实现OTSU方式的阈值分割。且设定阈值thresh为0。

 首页
首页 电话咨询
电话咨询